EMKO PROOP ආදානය හෝ ප්රතිදාන මොඩියුලය

පෙරවදන
Proop-I/O මොඩියුලය Prop උපාංගය සමඟ භාවිතා වේ. එය ඕනෑම වෙළඳ නාමයක් සඳහා දත්ත මාර්ගයක් ලෙසද භාවිතා කළ හැක. Proop-I/O මොඩියුලය ස්ථාපනය කිරීමට සහ සම්බන්ධ කිරීමට මෙම ලේඛනය පරිශීලකයාට උපකාරී වනු ඇත.
- මෙම නිෂ්පාදනයේ ස්ථාපනය ආරම්භ කිරීමට පෙර, කරුණාකර උපදෙස් අත්පොත කියවන්න.
- ලේඛනයේ අන්තර්ගතය යාවත්කාලීන කර තිබිය හැක. ඔබට වඩාත්ම යාවත්කාලීන අනුවාදය වෙත ප්රවේශ විය හැක www.emkoelektronik.com.tr
- මෙම සංකේතය ආරක්ෂිත අනතුරු ඇඟවීම් සඳහා භාවිතා කරයි. පරිශීලකයා මෙම අනතුරු ඇඟවීම් කෙරෙහි අවධානය යොමු කළ යුතුය.
පාරිසරික තත්ත්වයන්
| මෙහෙයුම් උෂ්ණත්වය: | 0-50සී |
| උපරිම ආර්ද්රතාවය: | 0-90 %RH (කිසිවක් ඝනීභවනය නොවේ) |
| බර: | 238 gr |
| මානය: | 160 x 90 x 35 මි.මී |
විශේෂාංග
Proop-I/O මොඩියුල ආදාන-ප්රතිදාන අනුව වර්ග කිහිපයකට බෙදා ඇත. වර්ග පහත පරිදි වේ.
| නිෂ්පාදන වර්ගය
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| මොඩියුල සැපයුම | |||||||||||
| 24 Vdc/Vac (හුදකලා වීම) | 2 | |||
| සන්නිවේදනය | ||||
| RS-485 (හුදකලා) | 2 | |||
| ඩිජිටල් යෙදවුම් | ||||
| 8x ඩිජිටල් | 1 | |||
| ඩිජිටල් නිමැවුම් | ||||
| 8x 1A ට්රාන්සිස්ටරය (+V) | 3 | |||
| ඇනලොග් යෙදවුම් | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0...50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| Analog Outputs | |||
| 2x 0/4…20mAdc
2x 0…10Vdc |
1 | ||
| 2 | |||
මානයන්
Proop උපාංගයේ මොඩියුලය සවි කිරීම
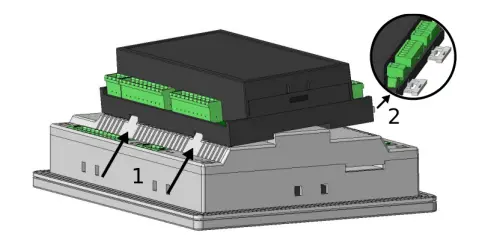 |
1- පින්තූරයේ ඇති පරිදි Prop I/O මොඩියුලය Prop උපාංගයේ සිදුරු තුලට ඇතුල් කරන්න.
2- අගුලු දැමීමේ කොටස් Proop-I/ O Module උපාංගයට සම්බන්ධ කර පිටතට ඇද ඇත්දැයි පරීක්ෂා කරන්න. |
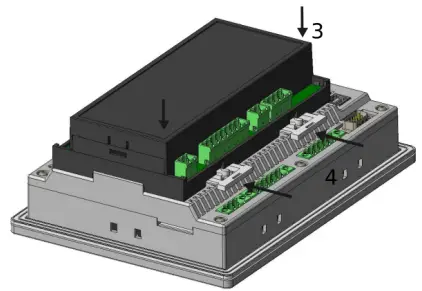 |
3- Proop-I / O මොඩියුල උපාංගය නිශ්චිත දිශාවට තදින් ඔබන්න.
4- ඒවා තල්ලු කිරීමෙන් අගුලු දැමීමේ කොටස් ඇතුල් කරන්න. |
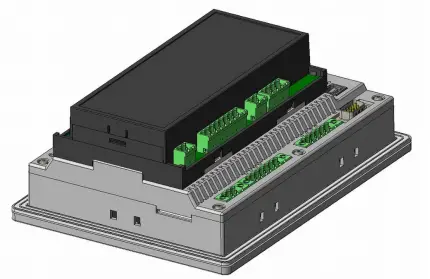 |
5- මොඩියුල උපාංගයේ ඇතුළු කළ රූපය වම් පැත්තේ ඇති රූපය මෙන් විය යුතුය. |
DIN-Ray මත මොඩියුලය සවි කිරීම
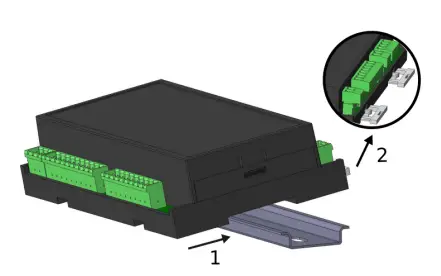 |
1- පෙන්වා ඇති පරිදි Proop-I/O Module උපාංගය DIN-ray මතට ඇද දමන්න.
2- අගුලු දැමීමේ කොටස් Prop-I/O Module උපාංගයට සම්බන්ධ කර පිටතට ඇද ඇත්දැයි පරීක්ෂා කරන්න. |
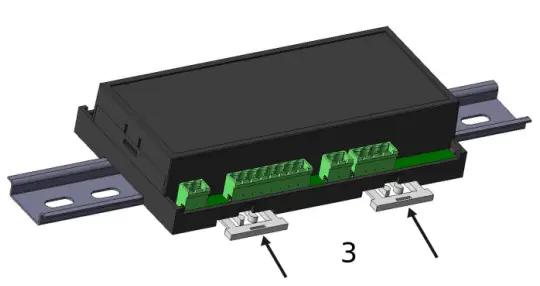 |
3- ඒවා තල්ලු කිරීමෙන් අගුලු දැමීමේ කොටස් ඇතුල් කරන්න. |
 |
4- මොඩියුල උපාංගයේ ඇතුළත් කළ රූපය වම් පැත්තේ මෙන් දිස්විය යුතුය. |
ස්ථාපනය
- මෙම නිෂ්පාදනයේ ස්ථාපනය ආරම්භ කිරීමට පෙර, කරුණාකර පහත උපදෙස් අත්පොත සහ අනතුරු ඇඟවීම් හොඳින් කියවන්න.
- නැව්ගත කිරීමේදී සිදුවිය හැකි හානිය සඳහා මෙම නිෂ්පාදනයේ දෘශ්ය පරීක්ෂණයක් ස්ථාපනය කිරීමට පෙර නිර්දේශ කරනු ලැබේ. සුදුසුකම් ලත් යාන්ත්රික සහ විදුලි කාර්මික ශිල්පීන් මෙම නිෂ්පාදනය ස්ථාපනය කිරීම සහතික කිරීම ඔබේ වගකීමකි.
- දහනය කළ හැකි හෝ පුපුරන සුලු වායුමය වායුගෝලයේ ඒකකය භාවිතා නොකරන්න.
- සෘජු හිරු කිරණ හෝ වෙනත් තාප ප්රභවයකට ඒකකය නිරාවරණය නොකරන්න.
- ට්රාන්ස්ෆෝමර්, මෝටර හෝ මැදිහත්වීම් ඇති කරන උපාංග (වෑද්දුම් යන්ත්ර ආදිය) වැනි චුම්බක උපකරණ අසල ඒකකය ස්ථානගත නොකරන්න.
- උපාංගය මත විදුලි ශබ්දයේ බලපෑම අඩු කිරීමට, අඩු පරිමාවtage රේඛාව (විශේෂයෙන් සංවේදක ආදාන කේබල්) රැහැන් ඉහළ ධාරාවකින් සහ පරිමාවකින් වෙන් කළ යුතුයtagඊ රේඛාව.
- පුවරුවේ උපකරණ ස්ථාපනය කිරීමේදී, ලෝහ කොටස්වල තියුණු දාර නිසා අත්වල කැපුම් ඇති විය හැක, කරුණාකර ප්රවේශම් වන්න.
- නිෂ්පාදනයේ සවි කිරීම එහිම cl එකකින් සිදු කළ යුතුයamps.
- නුසුදුසු cl සමඟ උපාංගය සවි නොකරන්නamps. ස්ථාපනය අතරතුර උපාංගය අතහරින්න එපා.
- හැකි නම්, ආරක්ෂිත කේබලයක් භාවිතා කරන්න. බිම වළලු වළක්වා ගැනීම සඳහා පලිහ එක් කෙළවරක පමණක් බිම තැබිය යුතුය.
- විදුලි කම්පනය හෝ උපාංගයට හානි වැළැක්වීම සඳහා, සියලු රැහැන් අවසන් වන තුරු උපාංගයට බලය යොදන්න එපා.
- ඩිජිටල් නිමැවුම් සහ සැපයුම් සම්බන්ධතා නිර්මාණය කර ඇත්තේ එකිනෙකින් හුදකලා වීමටය.
- උපාංගය ආරම්භ කිරීමට පෙර, අපේක්ෂිත භාවිතයට අනුකූලව පරාමිතීන් සැකසිය යුතුය.
- අසම්පූර්ණ හෝ වැරදි වින්යාසය අනතුරුදායක විය හැක.
- ඒකකය සාමාන්යයෙන් බල ස්විචයක්, ෆියුස් හෝ පරිපථ කඩනයක් නොමැතිව සපයනු ලැබේ. ප්රාදේශීය රෙගුලාසි වලට අනුව බල ස්විචයක්, ෆියුස් සහ පරිපථ කඩනයක් භාවිතා කරන්න.
- ශ්රේණිගත බල සැපයුම් පරිමාව පමණක් යොදන්නtagඊ ඒකකයට, උපකරණ හානි වැළැක්වීම සඳහා.
- මෙම ඒකකයේ දෝෂයක් හෝ දෝෂයක් හේතුවෙන් බරපතල අනතුරක් සිදුවීමේ අවදානමක් තිබේ නම්, පද්ධතිය විසන්ධි කර පද්ධතියෙන් උපාංගය විසන්ධි කරන්න.
- මෙම ඒකකය විසුරුවා හැරීමට, වෙනස් කිරීමට හෝ අලුත්වැඩියා කිරීමට කිසි විටෙකත් උත්සාහ නොකරන්න. ටීampඒකකය සමඟ ering දෝෂයක්, විදුලි කම්පනය, හෝ ගින්නක් ඇති විය හැක.
- මෙම ඒකකයේ ආරක්ෂිත ක්රියාකාරිත්වය සම්බන්ධ ඕනෑම ප්රශ්නයක් සඳහා කරුණාකර අප හා සම්බන්ධ වන්න.
- මෙම උපදෙස් අත්පොතෙහි දක්වා ඇති ආකාරයට මෙම උපකරණ භාවිතා කළ යුතුය.
සම්බන්ධතා
බල සැපයුම
 |
පර්යන්තය |
| + | |
|
– |
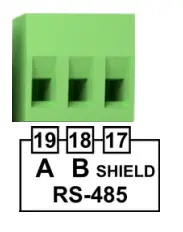
HMI උපාංගය සමඟ සන්නිවේදන සබැඳිය
 |
පර්යන්තය |
| A | |
| B | |
| GND |
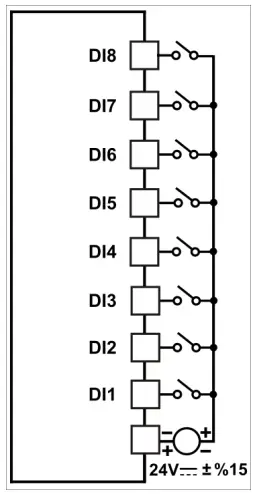
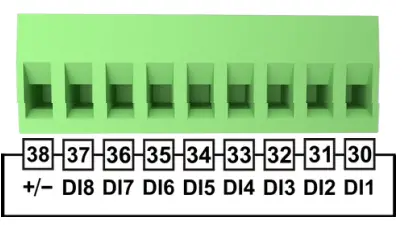
ඩිජිටල් යෙදවුම්
|
|
පර්යන්තය | අදහස් දක්වන්න | සම්බන්ධතා ෂෙමේ |
| DI8 |
ඩිජිටල් යෙදවුම් |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN / PNP
ඩිජිටල් යෙදවුම් තෝරාගැනීම |
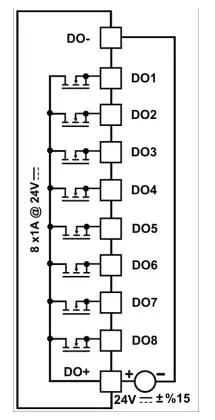
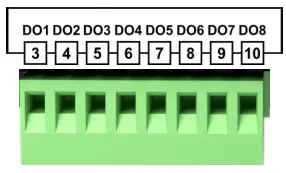
ඩිජිටල් නිමැවුම්
|
|
පර්යන්තය | අදහස් දක්වන්න | සම්බන්ධතා යෝජනා ක්රමය |
| ඩොක්ස්නිය් |
ඩිජිටල් නිමැවුම් |
 |
|
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් | |||
| ඩොක්ස්නිය් |
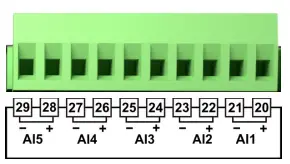
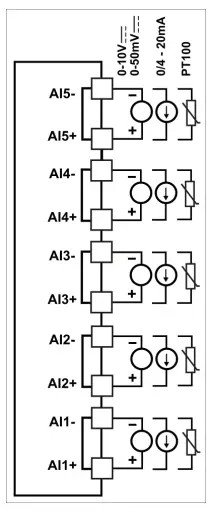
ඇනලොග් යෙදවුම්
|
පර්යන්තය | අදහස් දක්වන්න | සම්බන්ධතා යෝජනා ක්රමය |
| AI5- |
Analog Input5 |
 |
|
| AI5+ | |||
| AI4- |
Analog Input4 |
||
| AI4+ | |||
| AI3- |
Analog Input3 |
||
| AI3+ | |||
| AI2- |
Analog Input2 |
||
| AI2+ | |||
| AI1- |
Analog Input1 |
||
| AI1+ |
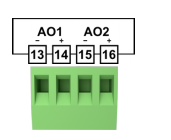
Analog Outputs
|
|
පර්යන්තය | අදහස් දක්වන්න | සම්බන්ධතා යෝජනා ක්රමය |
|
AO+ |
Analog Output Supply |
 |
|
|
AO- |
|||
|
AO1 |
Analog Outputs |
||
|
AO2 |
තාක්ෂණික ලක්ෂණ
බල සැපයුම
| බල සැපයුම | : | 24VDC |
| අවසර ලත් පරාසය | : | 20.4 - 27.6 VDC |
| බලශක්ති පරිභෝජනය | : | 3W |
ඩිජිටල් යෙදවුම්
| ඩිජිටල් යෙදවුම් | : | 8 ආදානය | |
| නාමික ආදාන වෙළුමtage | : | 24 VDC | |
|
ආදාන වෙළුමtage |
: |
තර්ක 0 සඳහා | තර්ක 1 සඳහා |
| < 5 VDC | >10 VDC | ||
| ආදාන ධාරාව | : | 6mA උපරිම. | |
| ආදාන සම්බාධනය | : | 5.9 kΩ | |
| ප්රතිචාර කාලය | : | '0' සිට '1' දක්වා 50ms | |
| ගැල්වනික් හුදකලා කිරීම | : | විනාඩි 500කට VAC 1ක් | |
අධිවේගී කවුන්ටර යෙදවුම්
| HSC ආදාන | : | 2 ආදානය (HSC1: DI1 සහ DI2, HSC2: DI3 සහ DI4) | |
| නාමික ආදාන වෙළුමtage | : | 24 VDC | |
|
ආදාන වෙළුමtage |
: |
තර්ක 0 සඳහා | තර්ක 1 සඳහා |
| < 10 VDC | >20 VDC | ||
| ආදාන ධාරාව | : | 6mA උපරිම. | |
| ආදාන සම්බාධනය | : | 5.6 kΩ | |
| සංඛ්යාත පරාසය | : | 15KHz උපරිම. තනි අදියර සඳහා උපරිම 10KHz. ද්විත්ව අදියර සඳහා | |
| ගැල්වනික් හුදකලා කිරීම | : | විනාඩි 500කට VAC 1ක් | |
ඩිජිටල් නිමැවුම්
| ඩිජිටල් නිමැවුම් | 8 ප්රතිදානය | |
| නිමැවුම් ධාරාව | : | 1 උපරිම. (මුළු ධාරාව 8 A උපරිම.) |
| ගැල්වනික් හුදකලා කිරීම | : | විනාඩි 500කට VAC 1ක් |
| කෙටි පරිපථ ආරක්ෂණය | : | ඔව් |
ඇනලොග් යෙදවුම්
| ඇනලොග් යෙදවුම් | : | 5 ආදානය | |||
|
ආදාන සම්බාධනය |
: |
පීටී-100 | 0/4-20mA | 0-10V | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10MΩ | ||
| ගැල්වනික් හුදකලා කිරීම | : | නැත | |||
| විභේදනය | : | බිටු 14 | |||
| නිරවද්යතාව | : | ±0,25% | |||
| Sampකාලය | : | 250 ms | |||
| තත්ව දර්ශකය | : | ඔව් | |||
Analog Outputs
|
Analog Output |
: |
2 ප්රතිදානය | |
| 0/4-20mA | 0-10V | ||
| ගැල්වනික් හුදකලා කිරීම | : | නැත | |
| විභේදනය | : | බිටු 12 | |
| නිරවද්යතාව | : | සම්පූර්ණ පරිමාණයෙන් 1% | |
අභ්යන්තර ලිපින අර්ථ දැක්වීම්
සන්නිවේදන සැකසුම්:
| පරාමිතීන් | ලිපිනය | විකල්ප | පෙරනිමිය |
| ID | 40001 | 1-255 | 1 |
| ආරක්ෂාව | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 /
6- 57600 /7- 115200 |
6 |
| STOP BIT | 40003 | 0- 1Bit / 1- 2Bit | 0 |
| PARITY | 40004 | 0- කිසිවක් නැත / 1- ඉරට්ටේ / 2- ඔත්තේ | 0 |
උපාංග ලිපින:
| මතකය | ආකෘතිය | අරංගේ | ලිපිනය | ටයිප් කරන්න |
| ඩිජිටල් ආදානය | DIN | n: 0 - 7 | 10001 - 10008 | කියවන්න |
| ඩිජිටල් ප්රතිදානය | ඩොන් | n: 0 - 7 | 1 - 8 | කියවන්න - ලියන්න |
| ඇනලොග් ආදානය | ඒඅයින් | n: 0 - 7 | 30004 - 30008 | කියවන්න |
| Analog Output | AOn | n: 0 - 1 | 40010 - 40011 | කියවන්න - ලියන්න |
| පිටපත* | (aaabbbbbcccccc)ටිකක් | n: 0 | 30001 | කියවන්න |
- සටහන:මෙම ලිපිනයේ ඇති a බිටු ප්රධාන වේ, b බිටු සුළු අනුවාද අංකය වේ, c බිටු උපාංග වර්ගය දක්වයි.
- Exampලෙ: 30001 (0x2121)hex = (0010000100100001)bit සිට කියවූ අගය ,
- a බිටු (001)බිට් = 1 (ප්රධාන අනුවාද අංකය)
- b බිටු (00001)බිට් = 1 (සුළු අනුවාද අංකය)
- c bits (00100001)bit = 33 (උපාංග වර්ග වගුවේ දක්වා ඇත.) උපාංග අනුවාදය = V1.1
- උපාංග වර්ගය = 0-10V Analog Input 0-10V Analog Output
උපාංග වර්ග:
| උපාංග වර්ගය | වටිනාකම |
| PT100 Analog Input 4-20mA Analog Output | 0 |
| PT100 Analog Input 0-10V Analog Output | 1 |
| 4-20mA Analog Input 4-20mA Analog Output | 16 |
| 4-20mA Analog Input 0-10V Analog Output | 17 |
| 0-10V Analog Input 4-20mA Analog Output | 32 |
| 0-10V Analog Input 0-10V Analog Output | 33 |
| 0-50mV Analog Input 4-20mA Analog Output | 48 |
| 0-50mV Analog Input 0-10V Analog Output | 49 |
ඇනලොග් ආදාන වර්ගය අනුව මොඩියුලයෙන් කියවන අගයන් පරිවර්තනය කිරීම පහත වගුවේ විස්තර කර ඇත:
| ඇනලොග් ආදානය | අගය පරාසය | පරිවර්තනය සාධකය | ExampPROOP හි පෙන්වා ඇති අගයේ le |
|
පීටී-100 -200 ° – 650° |
-2000 – 6500 |
x10–1 |
Example-1: 100 ලෙස කියවීමේ අගය 10 බවට පරිවර්තනය වේoC. |
| Example-2: 203 ලෙස කියවීමේ අගය 20.3 බවට පරිවර්තනය වේoC. | |||
| 0 – 10V | 0 - 20000 | 0.5×10–3 | Example-1: 2500 ලෙස කියවීමේ අගය 1.25V බවට පරිවර්තනය වේ. |
| 0 – 50mV | 0 - 20000 | 2.5×10–3 | Example-1: කියවීමේ අගය 3000 ලෙස 7.25mV බවට පරිවර්තනය වේ. |
|
0/4 – 20mA |
0 - 20000 |
0.1×10–3 |
Example-1: කියවීමේ අගය 3500 ලෙස 7mA බවට පරිවර්තනය වේ. |
| Example-2: කියවීමේ අගය 1000 ලෙස 1mA බවට පරිවර්තනය වේ. |
ඇනලොග් ප්රතිදාන වර්ගයට අනුව මොඩියුලයේ ලියා ඇති අගයන් පරිවර්තනය කිරීම පහත වගුවේ විස්තර කෙරේ:
| Analog Output | අගය පරාසය | පරිවර්තනය අගය කරන්න | Exampමොඩියුලවල ලියා ඇති අගය |
| 0 – 10V | 0 - 10000 | x103 | Example-1: 1.25V ලෙස ලිවිය යුතු අගය 1250 බවට පරිවර්තනය වේ. |
| 0/4 – 20mA | 0 - 20000 | x103 | Example-1: 1.25mA ලෙස ලිවිය යුතු අගය 1250 බවට පරිවර්තනය වේ. |
Analog Input-විශේෂිත ලිපින:
| පරාමිතිය | AI1 | AI2 | AI3 | AI4 | AI5 | පෙරනිමිය |
| මානකරනය බිටු | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| අවම පරිමාණ අගය | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| උපරිම පරිමාණ අගය | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| පරිමාණ අගය | 30064 | 30070 | 30076 | 30082 | 30088 | – |
Analog Input Configuration Bits:
| AI1 | AI2 | AI3 | AI4 | AI5 | විස්තරය |
| 40123.0ටිකක් | 40133.0ටිකක් | 40143.0ටිකක් | 40153.0ටිකක් | 40163.0ටිකක් | 4-20mA/2-10V තෝරන්න:
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
ඇනලොග් ආදාන සඳහා පරිමාණ අගය 4-20mA / 2-10V තේරීම් වින්යාස බිටු තත්ත්වය අනුව ගණනය කෙරේ.
Analog Output විශේෂිත ලිපින:
| පරාමිතිය | AO1 | AO2 | පෙරනිමිය |
| ආදානය සඳහා අවම පරිමාණ අගය | 40173 | 40183 | 0 |
| ආදානය සඳහා උපරිම පරිමාණ අගය | 40174 | 40184 | 20000 |
| ප්රතිදානය සඳහා අවම පරිමාණ අගය | 40175 | 40185 | 0 |
| ප්රතිදානය සඳහා උපරිම පරිමාණ අගය | 40176 | 40186 | 10000/20000 |
| Analog Output Function
0: අතින් භාවිතය 1: ඉහත පරිමාණ අගයන් භාවිතා කරමින්, එය ප්රතිදානයට ආදානය පිළිබිඹු කරයි. 2: එය ප්රතිදානය සඳහා අවම සහ උපරිම පරිමාණ පරාමිති භාවිතා කරමින් PID ප්රතිදානය ලෙස ඇනලොග් ප්රතිදානය ධාවනය කරයි. |
40177 | 40187 | 0 |
- ඇනලොග් ප්රතිදාන ශ්රිත පරාමිතිය 1 හෝ 2 ලෙස සකසා ඇත්නම්;
- A1 ප්රතිදානය සඳහා ආදානය ලෙස AI01 භාවිතා වේ.
- A2 ප්රතිදානය සඳහා ආදානය ලෙස AI02 භාවිතා වේ.
- නැත: PT1 යෙදවුම් සහිත මොඩියුලවල ප්රතිදාන විශේෂාංගයට ආදානය පිළිබිඹු කිරීම (Analoque Output Function = 100) භාවිතා කළ නොහැක.
HSC (අධිවේගී කවුන්ටරය) සැකසුම්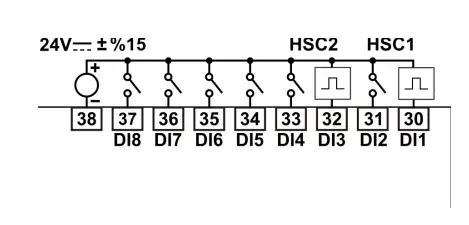
තනි අදියර කවුන්ටර සම්බන්ධතාවය
- අධිවේගී කවුන්ටර PROOP-IO ස්කෑන් ගාස්තු යටතේ පාලනය කළ නොහැකි අධිවේගී සිදුවීම් ගණන් කරයි. අධිවේගී කවුන්ටරයක උපරිම ගණන් කිරීමේ සංඛ්යාතය එන්කෝඩර් ආදාන සඳහා 10kHz සහ ප්රති ආදාන සඳහා 15kHz වේ.
- මූලික කවුන්ටර වර්ග පහක් ඇත: අභ්යන්තර දිශා පාලනය සහිත තනි-අදියර කවුන්ටරය, බාහිර දිශා පාලනය සහිත තනි-අදියර කවුන්ටරය, ඔරලෝසු ආදාන 2 ක් සහිත ද්වි-අදියර කවුන්ටරය, A/B අදියර හතරේ කවුන්ටරය සහ සංඛ්යාත මිනුම් වර්ගය.
- සටහන සෑම මාදිලියකටම සෑම කවුන්ටරයක්ම සහාය නොදක්වන බව. ඔබට සංඛ්යාත මිණුම් වර්ගය හැර සෑම වර්ගයකම භාවිතා කළ හැක: යළි පිහිටුවීම හෝ ආරම්භක යෙදවුම් නොමැතිව, යළි පිහිටුවීම සහ ආරම්භය නොමැතිව, හෝ ආරම්භක සහ යළි පිහිටුවීමේ යෙදවුම් දෙකම සමඟ.
- ඔබ යළි පිහිටුවීමේ ආදානය සක්රිය කළ විට, එය වත්මන් අගය ඉවත් කරන අතර ඔබ යළි පිහිටුවීම අක්රිය කරන තෙක් එය පැහැදිලිව රඳවා තබා ගනී.
- ඔබ ආරම්භක ආදානය සක්රිය කරන විට, එය කවුන්ටරය ගණන් කිරීමට ඉඩ සලසයි. ආරම්භය අක්රිය කර ඇති අතර, කවුන්ටරයේ වත්මන් අගය නියතව පවතින අතර ඔරලෝසු සිදුවීම් නොසලකා හරිනු ලැබේ.
- ආරම්භය අක්රියව තිබියදී යළි පිහිටුවීම සක්රිය කර ඇත්නම්, යළි පිහිටුවීම නොසලකා හරින අතර වත්මන් අගය වෙනස් නොවේ. යළි පිහිටුවීමේ ආදානය සක්රියව පවතින අතරතුර ආරම්භක ආදානය සක්රිය වුවහොත්, වත්මන් අගය හිස් වේ.
| පරාමිතීන් | ලිපිනය | පෙරනිමිය |
| HSC1 වින්යාසය සහ මාදිලිය තෝරන්න* | 40012 | 0 |
| HSC2 වින්යාසය සහ මාදිලිය තෝරන්න* | 40013 | 0 |
| HSC1 නව වත්මන් අගය (අඩුම සැලකිය යුතු 16 බයිට්) | 40014 | 0 |
| HSC1 නව වත්මන් අගය (වඩාත් වැදගත් 16 බයිට්) | 40015 | 0 |
| HSC2 නව වත්මන් අගය (අඩුම සැලකිය යුතු 16 බයිට්) | 40016 | 0 |
| HSC2 නව වත්මන් අගය (වඩාත් වැදගත් 16 බයිට්) | 40017 | 0 |
| HSC1 වත්මන් අගය (අඩුම සැලකිය යුතු බයිට් 16) | 30010 | 0 |
| HSC1 වත්මන් අගය (වඩාත් වැදගත් 16 බයිට්) | 30011 | 0 |
| HSC2 වත්මන් අගය (අඩුම සැලකිය යුතු බයිට් 16) | 30012 | 0 |
| HSC2 වත්මන් අගය (වඩාත් වැදගත් 16 බයිට්) | 30013 | 0 |
සටහන: මෙම පරාමිතිය;
- අවම සැලකිය යුතු බයිටය වන්නේ මාදිලියේ පරාමිතියයි.
- වඩාත්ම වැදගත් බයිටය වන්නේ මානකරන පරාමිතියයි.
HSC වින්යාස විස්තරය:
| එච්එස්සී 1 | එච්එස්සී 2 | විස්තරය |
| 40012.8ටිකක් | 40013.8ටිකක් | යළි පිහිටුවීම සඳහා ක්රියාකාරී මට්ටමේ පාලන බිට්:
0 = යළි පිහිටුවීම සක්රිය අඩුයි 1 = යළි පිහිටුවීම සක්රිය ඉහළයි |
| 40012.9ටිකක් | 40013.9ටිකක් | ආරම්භය සඳහා ක්රියාකාරී මට්ටමේ පාලන බිට්:
0 = ආරම්භය සක්රීයයි අඩුයි 1 = ආරම්භය සක්රියයි ඉහලයි |
| 40012.10ටිකක් | 40013.10ටිකක් | ගණන් කිරීමේ දිශා පාලන බිටු:
0 = ගණන් කිරීම 1 = ඉහළට ගණන් කරන්න |
| 40012.11ටිකක් | 40013.11ටිකක් | නව වත්මන් අගය HSC වෙත ලියන්න:
0 = යාවත්කාලීන නැත 1 = වත්මන් අගය යාවත්කාලීන කරන්න |
| 40012.12ටිකක් | 40013.12ටිකක් | HSC සබල කරන්න:
0 = HSC අක්රීය කරන්න 1 = HSC සක්රීය කරන්න |
| 40012.13ටිකක් | 40013.13ටිකක් | රක්ෂිතය |
| 40012.14ටිකක් | 40013.14ටිකක් | රක්ෂිතය |
| 40012.15ටිකක් | 40013.15ටිකක් | රක්ෂිතය |
HSC මාදිලි:
| මාදිලිය | විස්තරය | යෙදවුම් | |||
| එච්එස්සී 1 | DI1 | DI2 | DI5 | DI6 | |
| එච්එස්සී 2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | අභ්යන්තර දිශාව සහිත තනි අදියර කවුන්ටරය | ඔරලෝසුව | |||
| 1 | ඔරලෝසුව | යළි පිහිටුවන්න | |||
| 2 | ඔරලෝසුව | යළි පිහිටුවන්න | ආරම්භ කරන්න | ||
| 3 | බාහිර දිශාව සහිත තනි අදියර කවුන්ටරය | ඔරලෝසුව | දිශාව | ||
| 4 | ඔරලෝසුව | දිශාව | යළි පිහිටුවන්න | ||
| 5 | ඔරලෝසුව | දිශාව | යළි පිහිටුවන්න | ආරම්භ කරන්න | |
| 6 | 2 ඔරලෝසු ආදානය සහිත ද්වි අදියර කවුන්ටරය | ඔරලෝසුව ඉහළට | ඔරලෝසුව පහළට | ||
| 7 | ඔරලෝසුව ඉහළට | ඔරලෝසුව පහළට | යළි පිහිටුවන්න | ||
| 8 | ඔරලෝසුව ඉහළට | ඔරලෝසුව පහළට | යළි පිහිටුවන්න | ආරම්භ කරන්න | |
| 9 | A/B අදියර සංකේතක කවුන්ටරය | ඔරලෝසුව A | ඔරලෝසුව බී | ||
| 10 | ඔරලෝසුව A | ඔරලෝසුව බී | යළි පිහිටුවන්න | ||
| 11 | ඔරලෝසුව A | ඔරලෝසුව බී | යළි පිහිටුවන්න | ආරම්භ කරන්න | |
| 12 | රක්ෂිතය | ||||
| 13 | රක්ෂිතය | ||||
| 14 | කාලසීමාව මැනීම (10 μs සමගampලින්ග් වෙලාව) | කාල ආදානය | |||
| 15 | කවුන්ටරය /
කාල සීමාව Ölçümü (1ms sampලින්ග් වෙලාව) |
උපරිම. 15 kHz | උපරිම. 15 kHz | උපරිම. 1 kHz | උපරිම. 1 kHz |
මාදිලිය 15 සඳහා විශේෂිත ලිපින:
| පරාමිතිය | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | පෙරනිමිය |
| මානකරනය බිටු | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| කාල සීමාව යළි පිහිටුවීමේ කාලය (1-1000 s) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| කවුන්ටරය අඩු-ඇණවුම 16-bit අගය | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| කවුන්ටරය ඉහළ-ඇණවුම 16-bit අගය | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| කාල සීමාව අඩු-බිට් 16 අගය(ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| කාලපරිච්ඡේදය ඉහළ-බිට් 16-බිට් අගය(ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
මානකරනය බිටු:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | විස්තරය |
| 40193.0ටිකක් | 40201.0ටිකක් | 40209.0ටිකක් | 40217.0ටිකක් | 40225.0ටිකක් | 40233.0ටිකක් | 40241.0ටිකක් | 40249.0ටිකක් | DIx සක්රීය බිට්: 0 = DIx සක්රීය කරන්න 1 = DIx අක්රිය කරන්න |
|
40193.1ටිකක් |
40201.1ටිකක් |
40209.1ටිකක් |
40217.1ටිකක් |
40225.1ටිකක් |
40233.1ටිකක් |
40241.1ටිකක් |
40249.1ටිකක් |
දිශා බිටු ගණන් කරන්න:
0 = ගණන් කිරීම 1 = ඉහළට ගණන් කරන්න |
| 40193.2ටිකක් | 40201.2ටිකක් | 40209.2ටිකක් | 40217.2ටිකක් | 40225.2ටිකක් | 40233.2ටිකක් | 40241.2ටිකක් | 40249.2ටිකක් | රක්ෂිතය |
| 40193.3ටිකක් | 40201.3ටිකක් | 40209.3ටිකක් | 40217.3ටිකක් | 40225.3ටිකක් | 40233.3ටිකක් | 40241.3ටිකක් | 40249.3ටිකක් | DIx ගණන් යළි පිහිටුවීමේ බිටු:
1 = DIx කවුන්ටරය නැවත සකසන්න |
PID සැකසුම්
මොඩියුලයේ එක් එක් ප්රතිසම ආදානය සඳහා තීරණය කර ඇති පරාමිති සැකසීමෙන් PID හෝ On/Off පාලන විශේෂාංගය භාවිතා කළ හැක. PID හෝ ON/OFF ශ්රිතය සක්රිය කර ඇති ප්රතිසම ආදානය අනුරූප ඩිජිටල් ප්රතිදානය පාලනය කරයි. PID හෝ ON/OFF ශ්රිතය සක්රිය කර ඇති නාලිකාව හා සම්බන්ධ ඩිජිටල් ප්රතිදානය අතින් ධාවනය කළ නොහැක.
- Analog input AI1 ඩිජිටල් ප්රතිදානය DO1 පාලනය කරයි.
- Analog input AI2 ඩිජිටල් ප්රතිදානය DO2 පාලනය කරයි.
- Analog input AI3 ඩිජිටල් ප්රතිදානය DO3 පාලනය කරයි.
- Analog input AI4 ඩිජිටල් ප්රතිදානය DO4 පාලනය කරයි.
- Analog input AI5 ඩිජිටල් ප්රතිදානය DO5 පාලනය කරයි.
PID පරාමිතීන්:
| පරාමිතිය | විස්තරය |
| PID ක්රියාකාරී | PID හෝ ON/OFF මෙහෙයුම සබල කරයි.
0 = අතින් භාවිතා කිරීම 1 = PID සක්රිය 2 = සක්රිය / අක්රිය |
| අගය සකසන්න | එය PID හෝ ON/OFF ක්රියාකාරිත්වය සඳහා නියම කළ අගයයි. PT100 අගයන් ආදානය සඳහා -200.0 සහ 650.0 අතර, වෙනත් වර්ග සඳහා 0 සහ 20000 අතර විය හැක. |
| ඕෆ්සෙට් සකසන්න | එය PID මෙහෙයුමේදී Set Offset අගය ලෙස භාවිතා වේ. එය -325.0 සහ අතර අගයන් ගත හැක
PT325.0 ආදානය සඳහා 100, වෙනත් වර්ග සඳහා -10000 සිට 10000 දක්වා. |
| හිස්ටරෙසිස් සකසන්න | එය ON/OFF ක්රියාකාරීත්වයේදී Set Hysteresis අගය ලෙස භාවිතා වේ. එය අතර අගයන් ගත හැක
PT325.0 ආදානය සඳහා -325.0 සහ 100, වෙනත් වර්ග සඳහා -10000 සිට 10000 දක්වා. |
| අවම පරිමාණ අගය | වැඩ කරන පරිමාණය යනු පහළ සීමාව අගයයි. PT100 අගයන් -200.0 සහ අතර විය හැක
ආදානය සඳහා 650.0, වෙනත් වර්ග සඳහා 0 සහ 20000. |
| උපරිම පරිමාණ අගය | වැඩ කරන පරිමාණය ඉහළ සීමාව අගයයි. PT100 අගයන් -200.0 සහ අතර විය හැක
ආදානය සඳහා 650.0, වෙනත් වර්ග සඳහා 0 සහ 20000. |
| තාපන සමානුපාතික අගය | උණුසුම සඳහා සමානුපාතික අගය. එය 0.0 සහ 100.0 අතර අගයන් ගත හැක. |
| තාපන අනුකලිත අගය | උණුසුම සඳහා අනිවාර්ය අගය. එය තත්පර 0 සහ 3600 අතර අගයන් ගත හැක. |
| තාපන ව්යුත්පන්න අගය | උණුසුම සඳහා ව්යුත්පන්න අගය. එය 0.0 සහ 999.9 අතර අගයන් ගත හැක. |
| සිසිලන සමානුපාතික අගය | සිසිලනය සඳහා සමානුපාතික අගය. එය 0.0 සහ 100.0 අතර අගයන් ගත හැක. |
| සිසිලන සමෝධානික අගය | සිසිලනය සඳහා අනිවාර්ය අගය. එය තත්පර 0 සහ 3600 අතර අගයන් ගත හැක. |
| සිසිලන ව්යුත්පන්න අගය | සිසිලනය සඳහා ව්යුත්පන්න අගය. එය 0.0 සහ 999.9 අතර අගයන් ගත හැක. |
| නිමැවුම් කාලය | ප්රතිදානය යනු පාලන කාලයයි. එය තත්පර 1 සහ 150 අතර අගයන් ගත හැක. |
| උණුසුම / සිසිලනය තෝරන්න | PID හෝ ON/OFF සඳහා නාලිකා මෙහෙයුම සඳහන් කරයි. 0 = උණුසුම 1 = සිසිලනය |
| ස්වයංක්රීය නාදය | PID සඳහා ස්වයංක්රීය සුසර කිරීමේ මෙහෙයුම ආරම්භ කරයි.
0 = Auto Tune passive 1 = Auto Tune active |
- සටහන: තිත් සහිත අංකනයෙහි ඇති අගයන් සඳහා, මෙම පරාමිතිවල සැබෑ අගය මෙන් 10 ගුණයක් Modbus සන්නිවේදනයේදී භාවිතා වේ.
PID Modbus ලිපින:
| පරාමිතිය | AI1
ලිපිනය |
AI2
ලිපිනය |
AI3
ලිපිනය |
AI4
ලිපිනය |
AI5
ලිපිනය |
පෙරනිමිය |
| PID ක්රියාකාරී | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| අගය සකසන්න | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| ඕෆ්සෙට් සකසන්න | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| සංවේදක ඕෆ්සෙට් | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| හිස්ටරෙසිස් සකසන්න | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| අවම පරිමාණ අගය | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| උපරිම පරිමාණ අගය | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| තාපන සමානුපාතික අගය | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| තාපන අනුකලිත අගය | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| තාපන ව්යුත්පන්න අගය | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| සිසිලන සමානුපාතික අගය | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| සිසිලන සමෝධානික අගය | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| සිසිලන ව්යුත්පන්න අගය | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| නිමැවුම් කාලය | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| උණුසුම / සිසිලනය තෝරන්න | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| ස්වයංක්රීය නාදය | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| PID ක්ෂණික ප්රතිදාන අගය (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| PID තත්ව බිටු | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| PID වින්යාස බිටු | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| ස්වයංක්රීය සුසර තත්ව බිටු | 30026 | 30034 | 30042 | 30050 | 30058 | – |
PID වින්යාස බිටු:
| AI1 ලිපිනය | AI2 ලිපිනය | AI3 ලිපිනය | AI4 ලිපිනය | AI5 ලිපිනය | විස්තරය |
| 40039.0ටිකක් | 40059.0ටිකක් | 40079.0ටිකක් | 40099.0ටිකක් | 40119.0ටිකක් | PID විරාමය:
0 = PID මෙහෙයුම දිගටම පවතී. 1 = PID නවත්වන අතර ප්රතිදානය අක්රිය වේ. |
PID තත්ව බිටු:
| AI1 ලිපිනය | AI2 ලිපිනය | AI3 ලිපිනය | AI4 ලිපිනය | AI5 ලිපිනය | විස්තරය |
| 30025.0ටිකක් | 30033.0ටිකක් | 30041.0ටිකක් | 30049.0ටිකක් | 30057.0ටිකක් | PID ගණනය කිරීමේ තත්ත්වය:
0 = PID ගණනය කිරීම 1 = PID ගණනය නොකෙරේ. |
|
30025.1ටිකක් |
30033.1ටිකක් |
30041.1ටිකක් |
30049.1ටිකක් |
30057.1ටිකක් |
අනුකලිත ගණනය කිරීමේ තත්ත්වය:
0 = අනුකලනය ගණනය කිරීම 1 = අනුකලනය ගණනය නොකෙරේ |
ස්වයංක්රීය සුසර තත්ව බිටු:
| AI1 ලිපිනය | AI2 ලිපිනය | AI3 ලිපිනය | AI4 ලිපිනය | AI5 ලිපිනය | විස්තරය |
| 30026.0ටිකක් | 30034.0ටිකක් | 30042.0ටිකක් | 30050.0ටිකක් | 30058.0ටිකක් | ස්වයංක්රීය සුසර කිරීමේ පළමු පියවර තත්ත්වය:
1 = පළමු පියවර ක්රියාකාරී වේ. |
| 30026.1ටිකක් | 30034.1ටිකක් | 30042.1ටිකක් | 30050.1ටිකක් | 30058.1ටිකක් | ස්වයංක්රීය සුසර කිරීම දෙවන පියවර තත්ත්වය:
1 = දෙවන පියවර ක්රියාකාරී වේ. |
| 30026.2ටිකක් | 30034.2ටිකක් | 30042.2ටිකක් | 30050.2ටිකක් | 30058.2ටිකක් | ස්වයංක්රීය සුසර තෙවන පියවර තත්ත්වය:
1 = තුන්වන පියවර ක්රියාකාරී වේ. |
| 30026.3ටිකක් | 30034.3ටිකක් | 30042.3ටිකක් | 30050.3ටිකක් | 30058.3ටිකක් | ස්වයංක්රීය සුසර කිරීමේ අවසාන පියවර තත්ත්වය:
1 = ස්වයංක්රීය සුසර කිරීම සම්පූර්ණයි. |
| 30026.4ටිකක් | 30034.4ටිකක් | 30042.4ටිකක් | 30050.4ටිකක් | 30058.4ටිකක් | ස්වයංක්රීය සුසර කල් ඉකුත් වීමේ දෝෂය:
1 = කල් ඉකුත්වීමක් ඇත. |
පෙරනිමියෙන් සන්නිවේදන සැකසුම් ස්ථාපනය කිරීම
V01 අනුවාදය සහිත කාඩ්පත් සඳහා;
- I/O මොඩියුල උපාංගය ක්රියා විරහිත කරන්න.
- උපාංගයේ කවරය ඔසවන්න.
- පින්තූරයේ පෙන්වා ඇති සොකට් එකේ කෙටි පරිපථ කටු 2 සහ 4.
- ශක්තිය ලබා දීමෙන් අවම වශයෙන් තත්පර 2 ක් රැඳී සිටින්න. තත්පර 2 කට පසු, සන්නිවේදන සැකසුම් පෙරනිමියට නැවත පැමිණේ.
- කෙටි පරිපථය ඉවත් කරන්න.
- උපාංග ආවරණය වසන්න.
V02 අනුවාදය සහිත කාඩ්පත් සඳහා;
- I/O මොඩියුල උපාංගය ක්රියා විරහිත කරන්න.
- උපාංගයේ කවරය ඔසවන්න.
- පින්තූරයේ පෙන්වා ඇති සොකට් මත ජම්පර් එකක් දමන්න.
- ශක්තිය ලබා දීමෙන් අවම වශයෙන් තත්පර 2 ක් රැඳී සිටින්න. තත්පර 2 කට පසු, සන්නිවේදන සැකසුම් පෙරනිමියට නැවත පැමිණේ.
- ජම්පරය ඉවත් කරන්න.
- උපාංග ආවරණය වසන්න.
Modbus වහල් ලිපිනය තේරීම
modbus හි 1 ලිපිනයෙන් වහල් ලිපිනය 255 සිට 40001 දක්වා සැකසිය හැක. මීට අමතරව, V02 කාඩ්පත්වල වහල් ලිපිනය සැකසීමට කාඩ්පතෙහි ඇති ඩිප් ස්විචය භාවිතා කළ හැක.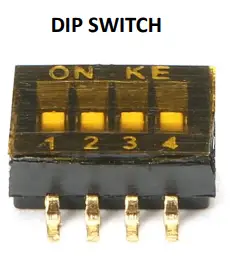
| ඩිප් ස්විච් | ||||
| වහල් ID | 1 | 2 | 3 | 4 |
| නොවේ1 | ON | ON | ON | ON |
| 1 | අක්රියයි | ON | ON | ON |
| 2 | ON | අක්රියයි | ON | ON |
| 3 | අක්රියයි | අක්රියයි | ON | ON |
| 4 | ON | ON | අක්රියයි | ON |
| 5 | අක්රියයි | ON | අක්රියයි | ON |
| 6 | ON | අක්රියයි | අක්රියයි | ON |
| 7 | අක්රියයි | අක්රියයි | අක්රියයි | ON |
| 8 | ON | ON | ON | අක්රියයි |
| 9 | අක්රියයි | ON | ON | අක්රියයි |
| 10 | ON | අක්රියයි | ON | අක්රියයි |
| 11 | අක්රියයි | අක්රියයි | ON | අක්රියයි |
| 12 | ON | ON | අක්රියයි | අක්රියයි |
| 13 | අක්රියයි | ON | අක්රියයි | අක්රියයි |
| 14 | ON | අක්රියයි | අක්රියයි | අක්රියයි |
| 15 | අක්රියයි | අක්රියයි | අක්රියයි | අක්රියයි |
- සටහන 1: සියලුම ඩිප් ස්විචයන් ක්රියාත්මක වන විට, මෝඩ්බස් රෙජිස්ටර් 40001 හි අගය වහල් ලිපිනය ලෙස භාවිතා වේ.
වගකීම් සහතිකය
මෙම නිෂ්පාදනය ගැනුම්කරු වෙත නැව්ගත කළ දින සිට වසර දෙකක කාලයක් සඳහා ද්රව්ය හා වැඩ කිරීමේ දෝෂවලට එරෙහිව සහතික කෙරේ. වගකීම් සහතිකය නිෂ්පාදකයාගේ අභිමතය පරිදි දෝෂ සහිත ඒකකය අලුත්වැඩියා කිරීමට හෝ ප්රතිස්ථාපනය කිරීමට සීමා වේ. නිෂ්පාදිතය වෙනස් කර ඇත්නම්, වැරදි ලෙස භාවිතා කර ඇත්නම්, විසුරුවා හරිනු ලැබුවහොත් හෝ වෙනත් ආකාරයකින් අපයෝජනය කර ඇත්නම් මෙම වගකීම් සහතිකය අවලංගු වේ.
නඩත්තු කිරීම
අළුත්වැඩියා කිරීම සිදු කළ යුත්තේ පුහුණු සහ විශේෂිත පුද්ගලයින් විසින් පමණි. අභ්යන්තර කොටස් වෙත ප්රවේශ වීමට පෙර උපාංගයට බලය කපා. හයිඩ්රොකාබන් මත පදනම් වූ ද්රාවක (පෙට්රල්, ට්රයික්ලෝරෙතිලීන්, ආදිය) සමඟ නඩුව පිරිසිදු නොකරන්න. මෙම ද්රාවණ භාවිතා කිරීමෙන් උපාංගයේ යාන්ත්රික විශ්වසනීයත්වය අඩු කළ හැකිය.
වෙනත් තොරතුරු
- නිෂ්පාදක තොරතුරු:
- Emko Elektronik Sanayi සහ Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- බර්සා/තුර්කිය
- දුරකථනය: (224) 261 1900
- ෆැක්ස්: (224) 261 1912
- අලුත්වැඩියා සහ නඩත්තු සේවා තොරතුරු:
- Emko Elektronik Sanayi සහ Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- බර්සා/තුර්කිය
- දුරකථනය: (224) 261 1900
- ෆැක්ස්: (224) 261 1912
ලේඛන / සම්පත්
 |
EMKO PROOP ආදානය හෝ ප්රතිදාන මොඩියුලය [pdf] පරිශීලක අත්පොත PROOP, Input හෝ Output Module, PROOP ආදාන හෝ ප්රතිදාන මොඩියුලය, ආදාන මොඩියුලය, ප්රතිදාන මොඩියුලය, මොඩියුලය |



