TRINAMIC TMCM-1180 Stepper Motor Controller User Guide

ට්රිනාමික් චලන පාලන GmbH සහ Co. KG හැම්බර්ග්, ජර්මනිය www.trinamic.com
බාගත කර ඇත Arrow.com.
1 විශේෂාංග
PD86-1180 යනු නවීන විශේෂාංග කට්ටලයක් සහිත සම්පූර්ණ mechatronic විසඳුමකි. එය ඉතා ඒකාබද්ධ වන අතර පහසු හැසිරවීමක් ලබා දෙයි. PD86-1180 NEMA 34 (flange size 86mm) ස්ටෙපර් මෝටරයකින්, පාලක/ධාවක ඉලෙක්ට්රොනික උපකරණ සහ ඒකාබද්ධ කේතකයකින් සමන්විත වේ. TMCM-1180 යනු සංවේදක රහිත බර මත යැපෙන ධාරා පාලනය සඳහා නව කැපී පෙනෙන coolStepTM තාක්ෂණයෙන් සමන්විත බුද්ධිමත් ස්ටෙපර් මෝටර් පාලක/ධාවක මොඩියුලයකි. මෙය බලශක්ති කාර්යක්ෂම මෝටර් ක්රියාකාරිත්වයට ඉඩ සලසයි. උසස් stallGuard2TM විශේෂාංගය සමඟින් මෝටරයේ බර ඉහළ විභේදනයකින් හඳුනාගත හැකිය. මොඩියුලය නිර්මාණය කර ඇත්තේ 86mm ෆ්ලැන්ජ් QMot ස්ටෙපර් මෝටරයක් මත කෙලින්ම සවි කිරීමටය.
ප්රධාන ලක්ෂණ
විදුලි දත්ත
- සැපයුම් පරිමාවtage: +24V DC හෝ +48V DC නාමික
- මෝටර් ධාරාව: 5.5A RMS දක්වා (වැඩසටහන්ගත කළ හැකි)
පැන්ඩ්රයිව් මෝටරය
- 5.5A දක්වා RMS අංකයක් සහිත ද්වි-අදියර බයිපෝලර් ස්ටෙපර් මෝටරය. දඟර ධාරාව
- රැඳවුම් ව්යවර්ථය: 7Nm
සංකේතකය
– Integrated sensOstep චුම්බක කේතකය (භ්රමණයකට උපරිම වර්ධක 256) උදා: සියලුම මෙහෙයුම් තත්ත්වයන් සහ ස්ථානගත කිරීම් යටතේ පියවර අලාභ හඳුනාගැනීම සඳහා
ඒකාබද්ධ චලන පාලකය
- චලන ප්රෝfile තත්ය කාලීන ගණනය කිරීම (TMC428/429 චලන පාලකය)
- මෝටර් පරාමිතීන් පියාසර කිරීම වෙනස් කිරීමේදී (උදා: පිහිටීම, ප්රවේගය, ත්වරණය)
- සමස්ත පද්ධති පාලනය සහ අනුක්රමික සන්නිවේදන ප්රොටෝකෝලය හැසිරවීම සඳහා ඉහළ ක්රියාකාරී ක්ෂුද්ර පාලකය
බයිපෝලර් ස්ටෙපර් මෝටර් රියදුරු
- සම්පූර්ණ පියවරකට මයික්රොස්ටෙප් 256 දක්වා
- අධි-කාර්යක්ෂම මෙහෙයුම, අඩු බලය විසුරුවා හැරීම
- ගතික ධාරා පාලනය
- ඒකාබද්ධ ආරක්ෂාව
- කුටිය හඳුනාගැනීම සඳහා stallGuard2 විශේෂාංගය
- අඩු බලශක්ති පරිභෝජනය සහ තාපය විසුරුවා හැරීම සඳහා coolStep විශේෂාංගය
අතුරුමුහුණත්
- නැවතුම් ස්විච (වම් සහ දකුණ) සහ නිවසේ ස්විචය සඳහා යෙදවුම්
- පොදු කාර්ය යෙදවුම් සහ පොදු කාර්ය ප්රතිදානයන් 2ක්
– USB, RS232, RS485 සහ CAN (2.0B සිට 1Mbit/s දක්වා) සන්නිවේදන අතුරුමුහුණත්
ආරක්ෂිත විශේෂාංග
- වසා දැමීමේ ආදානය. මෙම පින් එක විවෘතව හෝ බිමට කෙටි කර ඇති තාක් රියදුරු දෘඪාංගයේ අක්රිය වනු ඇත
- වෙනම සැපයුම් පරිමාවtagධාවක සහ ඩිජිටල් තර්කනය සඳහා ඊ යෙදවුම් - ධාවක සැපයුම් පරිමාවtage සංඛ්යාංක තර්කනය සඳහා සපයන අතරතුර බාහිරව අක්රිය විය හැකි අතර එම නිසා සංඛ්යාංක තර්කනය සක්රීයව පවතී
මෘදුකාංග
- TMCL™ හෝ Canopen සමඟ ඇත
- ස්වාධීන TMCL මෙහෙයුම හෝ දුරස්ථ පාලක මෙහෙයුම
– 2048 TMCL විධාන සඳහා වැඩසටහන් මතකය (වාෂ්ප නොවන).
- PC-පාදක යෙදුම් සංවර්ධන මෘදුකාංග TMCL-IDE නොමිලේ ලබා ගත හැකිය
– CANOpen: CiA 301 + CiA 402 (නිවාස මාදිලිය, profile පිහිටුම් මාදිලිය සහ ප්රවේග මාදිලිය) සහය දක්වයි
අමතර තොරතුරු සඳහා කරුණාකර වෙනම TMCL සහ CANopen ස්ථිරාංග අත්පොත් බලන්න
2 ඇණවුම් කේත
කේබල් ඇතුළත් නොවේ. අවශ්ය නම් ඔබේ ඇණවුමට සුදුසු කේබල් ලූම් එක් කරන්න.

3 යාන්ත්රික සහ විදුලි අතුරුමුහුණත
3.1 TMCM-1180 මානයන් සහ සවි කිරීම් සිදුරු
පාලක/ධාවක පුවරුවේ (TMCM-1180) මානයන් දළ වශයෙන් වේ. 86mm ස්ටෙපර් මෝටරයේ පිටුපස පැත්තට ගැළපෙන පරිදි 86mm x 86mm. TMCM-1180 ගැලපෙන සම්බන්ධක නොමැතිව 21.5mm උස වේ. M4 ඉස්කුරුප්පු සඳහා සවි කිරීම් සිදුරු හතරක් ඇත.

3.2 PD86-1180 මානයන් සහ මෝටර් පිරිවිතර
PD86-1180 හි TMCM-1180 ස්ටෙපර් මෝටර් පාලකය/ධාවක ඉලෙක්ට්රොනික මොඩියුලය, sensOstep තාක්ෂණය මත පදනම් වූ චුම්බක කේතකයක් සහ 86mm ෆ්ලැන්ජ් ප්රමාණයේ බයිපෝලර් හයිබ්රිඩ් ස්ටෙපර් මෝටරයක් ඇතුළත් වේ.
3.2.1 PD86-3-1180 හි මානයන්

3.2.2 QSH8618-96-55-700 හි මෝටර් පිරිවිතර

3.2.3 QSH8618-96-55-700 හි ව්යවර්ථ රූපය
ව්යවර්ථ රූපය සරල සංසන්දනය කිරීමට ඉඩ දීම සඳහා සම්පූර්ණ පියවර ක්රියාකාරිත්වය සඳහා මෝටර් ව්යවර්ථ ලක්ෂණ විස්තර කරයි. සම්පූර්ණ පියවර ක්රියාකාරිත්වය සඳහා සෑම විටම නිරූපිත නොවන අනුනාද ලක්ෂ්ය ගණනාවක් (අඩු ව්යවර්ථයක් සහිත) ඇත. මයික්රොස්ටෙප් ක්රියාකාරිත්වය මගින් මේවා අවම කරනු ඇත.

3.3 TMCM-1180 සම්බන්ධක
PD86-1180 හි පාලක/ධාවක පුවරුව ඉලෙක්ට්රොනික උපකරණවලට මෝටර් දඟර ඇමිණීම සඳහා අභ්යන්තරව භාවිතා කරන මෝටර් සම්බන්ධකය ඇතුළු සම්බන්ධක අටක් ඉදිරිපත් කරයි. බල සම්බන්ධකයට අමතරව අනුක්රමික සන්නිවේදනය සඳහා සම්බන්ධක දෙකක් (මිනි-USB සඳහා එකක් සහ RS232/RS485/CAN සඳහා එකක්) සහ අමතර ආදාන සහ ප්රතිදාන සංඥා සඳහා සම්බන්ධක දෙකක් ඇත. තවද පියවර/දිශාව සඳහා එක් සම්බන්ධකයක් සහ කේතකය සඳහා තවත් සම්බන්ධකයක් ඇත. ප්රතිදාන සම්බන්ධකය පොදු කාර්ය ප්රතිදානයන් දෙකක් ඉදිරිපත් කරයි, එක් බල සැපයුම් පරිමාවක්tagඊ ප්රතිදානය, සහ එක් දෘඩාංග වසා දැමීමේ ආදානයක්. වසා දැමීමේ ආදානය විවෘතව තැබීමෙන් හෝ බිමට ගැටීමෙන් මෝටර් රියදුරු අක්රිය කරයිtagදෘඪාංගයේ ඊ. මෙහෙයුම සඳහා, මෙම ආදානය සැපයුම් පරිමාවට බැඳිය යුතුයtagඊ. ආදාන සම්බන්ධකය නැවතුම් ස්විච සඳහා යෙදවුම් දෙකක් (වම් සහ දකුණ), එක් නිවාස ස්විච ආදානය, පොදු කාර්ය යෙදවුම් දෙකක් සහ පද්ධතියට හෝ සංඥා භූමියට එක් සම්බන්ධතාවයක් ලබා දෙයි.



3.3.1 බල සම්බන්ධකය
මෙම මොඩියුලය ඩිජිටල් තර්කනය (පින් 2) සහ ධාවක/බලය සඳහා වෙනම බල සැපයුම් යෙදවුම් ඉදිරිපත් කරයි.tage (pin 1). සැපයුම් යෙදවුම් දෙකම පොදු බිම් සම්බන්ධතා භාවිතා කරයි (pin 3 සහ 4). මේ ආකාරයෙන්, රියදුරු සඳහා බල සැපයුම stage සංඛ්යාංක තාර්කික සැපයුම සක්රීයව තබාගැනීමේදී ස්ථාන සහ තත්ත්ව තොරතුරු පවත්වා ගෙන යන අතරතුර අක්රිය විය හැක.
+UDRIVER සැපයුම පමණක් බල අංශයට පමණක් බල සැපයුම සපයන්නේ නම්, අභ්යන්තර ඩයෝඩයක් තාර්කික අංශයට ද බලය බෙදා හරිනු ඇත. එබැවින්, වෙනම බල සැපයුම් අවශ්ය නොවන විට, මොඩියුලය බලගැන්වීම සඳහා pin 1 සහ 4 භාවිතා කළ හැකිය.

ඒකකයේ විශ්වාසනීය ක්රියාකාරිත්වය සහතික කිරීම සඳහා, බල සැපයුමට ප්රමාණවත් නිමැවුම් ධාරිත්රකයක් තිබිය යුතු අතර සැපයුම් කේබල් වලට අඩු ප්රතිරෝධයක් තිබිය යුතුය, එවිට චොපර් ක්රියාකාරිත්වය ඒකකයේ සෘජුවම බල සැපයුම් රැල්ලක් වැඩි කිරීමට හේතු නොවේ. චොපර් ක්රියාකාරිත්වය හේතුවෙන් බල සැපයුම් රැල්ල උපරිම වශයෙන් 100mV කිහිපයක් තබා ගත යුතුය.
බල සැපයුම සඳහා ඉඟි
- බල සැපයුම් කේබල් හැකිතාක් කෙටි කරන්න
- බල සැපයුම් කේබල් සඳහා විශාල විෂ්කම්භයන් භාවිතා කරන්න

3.3.2 අනුක්රමික සන්නිවේදන සම්බන්ධකය
අනුක්රමික සන්නිවේදනය සඳහා 2mm පිච් 8 පින් සම්බන්ධකයක් භාවිතා වේ. මෙම සම්බන්ධකය සමඟ මොඩියුලය RS232, RS485 සහ CAN සන්නිවේදනය සඳහා සහය දක්වයි.

3.3.3 USB සම්බන්ධකය
5-pin mini-USB සම්බන්ධකයක් පුවරුවේ ඇත (එකලස් කිරීමේ විකල්පය මත රඳා පවතී).

3.3.4 ප්රතිදාන සම්බන්ධකය
සාමාන්ය කාර්ය ප්රතිදානයන් දෙක සහ ධාවක සම්බන්ධ කිරීම සඳහා 2mm පිච් 4 පින් සම්බන්ධකයක් භාවිතා වේ.tage දෘඪාංග shutdown input pin ඒකකයට.
මෝටර් රියදුරු සක්රිය කිරීම සඳහා එස්tage සම්බන්ධ කරන්න /Shutdown (pin 2) +Ulogic (pin 1) වෙත!


3.3.5 ආදාන සම්බන්ධකය
සාමාන්ය කාර්ය යෙදවුම්, නිවාස සහ නැවතුම් ස්විචයන් ඒකකයට සම්බන්ධ කිරීම සඳහා 2mm පිච් 6 පින් සම්බන්ධකයක් භාවිතා කරයි.
සංසර්ග සම්බන්ධක නිවාස: PHR-6 විවාහ සම්බන්ධක සම්බන්ධතා: SPH-002T-P0.5S

3.2.5.1 වම් සහ දකුණු සීමා ස්විච
TMCM-1180 වින්යාසගත කළ හැකි අතර එමඟින් මෝටරයක් වම් සහ දකුණු සීමා ස්විචයක් ඇත (රූපය 4.9).
සංචාරකයා එක් සීමාවකට ළඟා වූ විට මෝටරය නතර වේ.

3.2.5.2 ත්රිත්ව ස්විච වින්යාසය
සමුද්දේශ ස්විච් ස්ථානය වටා ඉවසීමේ පරාසයක් වැඩසටහන්ගත කළ හැකිය. රූප සටහන 4.10 හි දක්වා ඇති පරිදි ත්රිත්ව ස්විච වින්යාසය සඳහා මෙය ප්රයෝජනවත් වේ. එම වින්යාසය තුළ ස්වයංක්රීය නැවතුම් ස්විචයන් ලෙස ස්විච දෙකක් භාවිතා වන අතර වම් නැවතුම් ස්විචය සහ දකුණු නැවතුම් ස්විචය අතර යොමු ස්විචය ලෙස එක් අතිරේක ස්විචයක් භාවිතා වේ. වම් නැවතුම් ස්විචය සහ යොමු ස්විචය එකට වයර් කර ඇත. මධ්ය ස්විචය (සංචාරක ස්විචය) පියවර අලාභයක් හඳුනා ගැනීම සඳහා අක්ෂය නිරීක්ෂණය කිරීමට ඉඩ සලසයි.

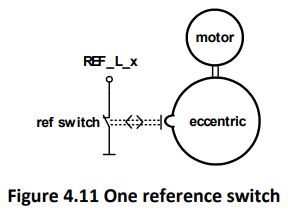
3.2.5.3 චක්රලේඛ පද්ධති සඳහා එක් සීමා මාරුවක්
චක්රලේඛ පද්ධතියක් භාවිතා කරන්නේ නම් (රූපය 4.11), එවැනි පද්ධතියක අවසාන ලක්ෂ්ය නොමැති බැවින් එක් යොමු ස්විචයක් පමණක් අවශ්ය වේ.
3.3.6 පියවර/දිශා සම්බන්ධකය
Step/Dir අතුරුමුහුණත සම්බන්ධ කිරීම සඳහා 2mm පිච් 4 පින් සම්බන්ධකයක් භාවිතා කරයි.

3.3.7 එන්කෝඩර් සම්බන්ධකය
එන්කෝඩරය සම්බන්ධ කිරීම සඳහා මිලිමීටර් 2 පිච් 5 පින් සම්බන්ධකයක් භාවිතා කරයි.
සංසර්ග සම්බන්ධක නිවාස: PHR-5 විවාහ සම්බන්ධක සම්බන්ධතා: SPH-002T-P0.5S

3.3.8 මෝටර් සම්බන්ධකය සහ පිරිවිතර
මෝටර් සම්බන්ධතාවය සඳහා 3.96mm පිච් 4 පින් සම්බන්ධකයක් භාවිතා වේ. මෝටර් දඟර දඟර (bipolar stepper motor) දෙකම මෙම සම්බන්ධකයට සම්බන්ධ වේ.
සංසර්ග සම්බන්ධක නිවාස: VHR-4N සංසර්ග සම්බන්ධක සම්බන්ධතා: BVH-21T-P1.1

4 ජම්පර්
පුවරුවේ බොහෝ සැකසුම් මෘදුකාංගය හරහා සිදු කෙරේ. එසේ වුවද, වින්යාස කිරීම සඳහා ජම්පර් කිහිපයක් තිබේ.

4.1 RS485 බස් නැවතුම
RS120 අතුරුමුහුණත නිසි ලෙස අවසන් කිරීම සඳහා පුවරුවට 485 Ohm ප්රතිරෝධයක් ඇතුළත් වේ. මෙම ජම්පරය වසා ඇති විට, ප්රතිරෝධකය RS485+ සහ RS485- යන අවකල්ය බස් මාර්ග දෙක අතර තබනු ඇත.
4.2 CAN බස් නැවතුම
CAN අතුරුමුහුණත නිසි ලෙස අවසන් කිරීම සඳහා පුවරුවට 120 Ohm ප්රතිරෝධයක් ඇතුළත් වේ. මෙම ජම්පරය වසා ඇති විට, ප්රතිරෝධකය CAN_H සහ CAN_L යන අවකල්ය බස් මාර්ග දෙක අතර තබනු ඇත.
5 මෙහෙයුම් ශ්රේණිගත කිරීම්
පහත දැක්වෙන මෙහෙයුම් ශ්රේණිගත කිරීම් සැලසුම් අගයන් ලෙස භාවිතා කළ යුතුය. කිසිම අවස්ථාවක මෙහෙයුම අතරතුර උපරිම අගයන් නොඉක්මවිය යුතුය.

*) පාලක ධාවක ඉලෙක්ට්රොනික උපකරණ 5.5°C පාරිසරික උෂ්ණත්වයේ දී වායු සංවහනයකින් තොරව මිනිත්තු 30ක් පූර්ණ ධාරාවකින් (50A RMS) ක්රියාත්මක වන දේශගුණික කුටියක් තුළ පරීක්ෂා කර ඇත.
නිසි සිසිලනයකින් තොරව සම්පූර්ණ ධාරාවකින් ධාවනය වන විට මෝටරය 50 ° C ට වඩා හොඳින් රත් විය හැක. මෙය ඉලෙක්ට්රොනික උපකරණ සඳහා පාරිසරික උෂ්ණත්වය සැලකිය යුතු ලෙස වැඩි කළ හැකිය. CoolStep මෙහෙයුම් ආකාරය භාවිතා කරන විට, සැබෑ ධාරාව වැඩසටහන්ගත කළ උපරිමයට වඩා සැලකිය යුතු ලෙස අඩු විය හැක. වත්මන් නිෂ්පාදනය සහ උෂ්ණත්වය.
6 ක්රියාකාරී විස්තරය
රූප සටහන 7.1 හි PD86-1180 හි ප්රධාන කොටස් පෙන්වා ඇත. PANdrive ප්රධාන වශයෙන් සමන්විත වන්නේ µC (EEPROM TMCL මතකයට සම්බන්ධ), TMC428/429 චලන පාලකය, TMC262A-PC බල ධාවකය එහි බලශක්ති කාර්යක්ෂම coolStep විශේෂාංගය, බාහිර MOSFET ධාවක එස්.tage, QSH8618 ස්ටෙපර් මෝටරය සහ ඒකාබද්ධ sensOstep කේතකය. විකල්පයක් ලෙස බාහිර කේතකයක් සම්බන්ධ කිරීමට හැකිය. නාමික සැපයුම් පරිමාවtages 24VDC හෝ 48VDC වේ.

6.1 පද්ධති ගෘහ නිර්මාණ ශිල්පය
TMCM-1180 TMCL (Trinamic Motion Control Language) මෙහෙයුම් පද්ධතිය සමඟ ක්ෂුද්ර පාලකයක් ඒකාබද්ධ කරයි. චලන පාලන තත්ය කාලීන කාර්යයන් TMC428/429 මගින් සාක්ෂාත් කරගනු ලැබේ.
6.1.1 ක්ෂුද්ර පාලකය
මෙම මොඩියුලයේ, TMCL මෙහෙයුම් පද්ධතිය ධාවනය කිරීමට සහ TMC91/7 පාලනය කිරීමට Atmel AT256SAM428X429 භාවිතා වේ. CPU සතුව 256KB ෆ්ලෑෂ් මතකයක් සහ 64KB RAM එකක් ඇත. ක්ෂුද්ර පාලකය TMCL (Trinamic Motion Control Language) මෙහෙයුම් පද්ධතිය ක්රියාත්මක කරන අතර එමඟින් RS232, RS485, USB හෝ CAN අතුරුමුහුණත හරහා ධාරකයෙන් මොඩියුලයට යවන TMCL විධාන ක්රියාත්මක කිරීමට හැකි වේ. ක්ෂුද්ර පාලකය TMCL විධාන අර්ථකථනය කරන අතර චලන විධාන ක්රියාත්මක කරන TMC428/429 පාලනය කරයි. ඊට අමතරව එය සංකේතාකක අතුරුමුහුණත සමඟ සම්බන්ධ වී ආදාන සකසයි. ක්ෂුද්ර පාලකයේ ෆ්ලෑෂ් ROM එක TMCL මෙහෙයුම් පද්ධතිය දරයි. TMCL මෙහෙයුම් පද්ධතිය RS232 අතුරුමුහුණත හරහා හෝ CAN අතුරුමුහුණත හරහා යාවත්කාලීන කළ හැක. මෙය කිරීමට TMCL-IDE භාවිතා කරන්න.
6.1.2 EEPROM
තනිව ක්රියා කිරීම සඳහා TMCL වැඩසටහන් ගබඩා කිරීම සඳහා TMCM-1180 මොඩියුලය ක්ෂුද්ර පාලකයට අමුණා ඇති 16kByte EEPROM එකකින් සමන්විත වේ. EEPROM හට TMCL විධාන 2048 දක්වා අඩංගු TMCL වැඩසටහන් ගබඩා කළ හැක. වින්යාස දත්ත ගබඩා කිරීමට EEPROM ද භාවිතා වේ.
6.1.3 චලන පාලකය
TMC428/429 යනු ඉහළ කාර්ය සාධනයක් සහිත ස්ටෙපර් මෝටර් පාලන IC එකක් වන අතර 2-phase-stepper-motors තුනක් දක්වා පාලනය කළ හැක. වේගය හෝ ත්වරණය වැනි චලන පරාමිතීන් ක්ෂුද්ර පාලකය මගින් SPI හරහා TMC428/429 වෙත යවනු ලැබේ. ආර් ගණනය කිරීමamps සහ speed profileඉලක්ක චලන පරාමිතීන් මත පදනම්ව දෘඪාංග මගින් අභ්යන්තරව සිදු කරනු ලැබේ.
6.1.4 ස්ටෙපර් මෝටර් රියදුරු
TMC262A-PC යනු බයිපෝලර් ස්ටෙපර් මෝටර සඳහා බලශක්ති කාර්යක්ෂම අධි ධාරා අධි නිරවද්ය මයික්රොස්ටෙප් ධාවක IC එකකි. TMCM-1180 මොඩියුලයේ ඇති මෙම ධාවකය QSH262 මෝටර් සහිත PANdrives සඳහා TMC8618 බල ධාවකයේ විශේෂ අනුවාදයකි.
එහි අද්විතීය අධි-විභේදන සංවේදක රහිත පැටවුම් හඳුනාගැනීමේ stallGuard2 භාවිතා කරනු ලබන්නේ coolStep නම් විශේෂ ඒකාබද්ධ බර රඳා පවතින ධාරා පාලන අංගයක් සඳහාය. බර කියවීමට සහ අධික බරක් හඳුනා ගැනීමට ඇති හැකියාව TMC262 ඉහළ විශ්වසනීයත්වයක් අපේක්ෂා කරන ධාවකයන් සඳහා ප්රශස්ත තේරීමක් කරයි. TMC262 පියවර/දිශා සංඥා මගින් මෙන්ම SPITM අනුක්රමික මගින්ද ධාවනය කළ හැක.

කූල්ස්ටෙප් ධාරා නියාමකය මඟින් බර වැඩිවීම හෝ අඩු කිරීම සඳහා ධාවකයේ ප්රතික්රියාව පාලනය කිරීමට ඉඩ සලසයි. අභ්යන්තර නියාමකය ප්රශස්ත මෝටර් ක්රියාකාරිත්වය සඳහා අවම සහ උපරිම බර කෝණය තීරණය කිරීම සඳහා එළිපත්ත දෙකක් භාවිතා කරයි. වත්මන් වර්ධක වේගය සහ වත්මන් අඩුවීමේ වේගය යෙදුමට අනුවර්තනය කළ හැකිය. අතිරේකව, වත්මන් පරිමාණ පරාමිතිය CS විසින් සකසන ලද ඉහළ ධාරා සීමාවට සාපේක්ෂව පහළ ධාරා සීමාව සැකසිය හැක.
6.1.5 sensOstep Encoder
මෙම ඒකකයේ භාවිතා වන sensOstep කේතකය අඩු විභේදනයක් සහිත චුම්බක කෝණික ස්ථාන කේතීකරණ පද්ධතියක් මත පදනම් වේ. එය ස්ටෙපර් මෝටර් අක්ෂයේ පිටුපස කෙළවරේ ස්ථානගත කර ඇති කුඩා චුම්බකයකින් සහ මෝටරයක පිටුපස පැත්තේ චුම්බකයට ඉහලින් තබා ඇති ඒකාබද්ධ ඩිජිටල් සංඥා සැකසුම් (උදා: ස්වයංක්රීය ලාභ පාලනය, උෂ්ණත්ව වන්දි ආදිය සඳහා) සහිත හෝල්-සංවේදක IC එකකින් සමන්විත වේ. මුද්රිත පරිපථ පුවරුව සවි කර ඇත. කේතකය විසින් එක් විප්ලවයකට බිට් 8 (පියවර 256) ක විභේදනයක් ලබා දෙන අතර එය සම්මත 1.8° ස්ටෙපර් මෝටරයකින් පියවර අලාභ හඳුනා ගැනීමට සම්පූර්ණයෙන්ම ප්රමාණවත් වේ.
7 TMCM-1180 මෙහෙයුම් විස්තරය
7.1 ගණනය කිරීම: ප්රවේගය සහ ත්වරණය එදිරිව මයික්රොස්ටෙප් සහ සම්පූර්ණ පියවර සංඛ්යාතය
TMC428/429 වෙත යවන ලද පරාමිතිවල අගයන් වේගය ලෙස තත්පරයට භ්රමණය වැනි සාමාන්ය මෝටර් අගයන් නොමැත. නමුත් මෙම අගයන් මෙම කොටසේ පෙන්වා ඇති පරිදි TMC428/429-පරාමිතීන් වලින් ගණනය කළ හැක.


8 ටී.එම්.සී.එල්
TMCL, TRINAMIC චලන පාලන භාෂාව, විශේෂිත නිෂ්පාදන (උදා TMCM-1180 TMCL ස්ථිරාංග අත්පොත) වෙත යොමු වන වෙනම ලියකියවිලි වල විස්තර කර ඇත. අත්පොත් www.trinamic.com හි සපයා ඇත. යාවත්කාලීන දත්ත පත්රිකා සහ යෙදුම් සටහන් සඳහා කරුණාකර මෙම මූලාශ්ර වෙත යොමු වන්න.
9 Canopen
TMCM-1180 මොඩියුලය අනාගත අනුවාද වල CANOpen ප්රොටෝකෝලය සමඟ ද භාවිතා කළ යුතුය. මේ සඳහා විශේෂ CANOpen ස්ථිරාංගයක් සංවර්ධනය වෙමින් පවතී. ඔබ මෙම විකල්පය ගැන උනන්දුවක් දක්වන්නේ නම් කරුණාකර TRINAMIC අමතන්න.
10 ජීවිත ආධාරක ප්රතිපත්තිය
TRINAMIC Motion Control GmbH & Co. KG විසින් TRINAMIC Motion Control GmbH & Co. KG හි නිශ්චිත ලිඛිත අවසරයකින් තොරව, ජීවිත ආධාරක පද්ධතිවල භාවිතය සඳහා එහි නිෂ්පාදන කිසිවක් අනුමත කිරීම හෝ සහතික කිරීම සිදු නොකරයි.
ජීවිත ආධාරක පද්ධති යනු ජීවිතයට සහාය වීමට හෝ පවත්වා ගැනීමට අදහස් කරන උපකරණ වන අතර, ලබා දී ඇති උපදෙස් වලට අනුකූලව නිසි ලෙස භාවිතා කළ විට ඒවා ඉටු කිරීමට අපොහොසත් වීම පුද්ගලික තුවාල හෝ මරණයට හේතු වනු ඇතැයි සාධාරණ ලෙස අපේක්ෂා කළ හැකිය.
© TRINAMIC Motion Control GmbH & Co. KG 2013 මෙම දත්ත පත්රිකාවේ දක්වා ඇති තොරතුරු නිවැරදි සහ විශ්වාසදායක බව විශ්වාස කෙරේ. කෙසේ වෙතත්, එහි භාවිතයේ ප්රතිවිපාක සඳහා හෝ එහි භාවිතය හේතුවෙන් ඇති විය හැකි තෙවන පාර්ශවයන්ගේ පේටන්ට් බලපත්ර හෝ වෙනත් අයිතිවාසිකම් උල්ලංඝනය කිරීමක් සම්බන්ධයෙන් වගකීම භාර නොගනී. දැනුම්දීමකින් තොරව පිරිවිතර වෙනස් වීමට යටත් වේ. භාවිතා කරන සියලුම වෙළඳ ලකුණු ඔවුන්ගේ අයිතිකරුවන්ගේ දේපළ වේ.

11 සංශෝධන ඉතිහාසය
11.1 දෘඪාංග සංශෝධනය

11.2 දෘඪාංග සංශෝධනය

12 යොමු
[TMCM-1180 / PD86-1180 TMCL] TMCM-1180 සහ PD86-1180 TMCL ස්ථිරාංග අත්පොත[TMCL-IDE] TMCL-IDE පරිශීලක අත්පොත
[QSH8618] QSH8618 අත්පොත
කරුණාකර යොමු කරන්න www.trinamic.com.
ලේඛන / සම්පත්
 |
TRINAMIC TMCM-1180 Stepper Motor Controller [pdf] පරිශීලක මාර්ගෝපදේශය TMCM-1180 Stepper Motor Controller, TMCM-1180, Stepper Motor Controller, Motor Controller, Controller |